Image extraction from: Adaptive hierarchical origami-based metastructures, DOI: 10.1038/s41467-024-50497-5
L’Università NC State sviluppa un robot trasformista ispirato all’origami
Tempo di lettura: 2 Min.
Aggiornato il Apr 6, 2025
-
![Kiara Fabbri]()
-
![Il team di localizzazione e traduzione]()
Tradotto da Il team di localizzazione e traduzione Servizi di localizzazione e traduzione

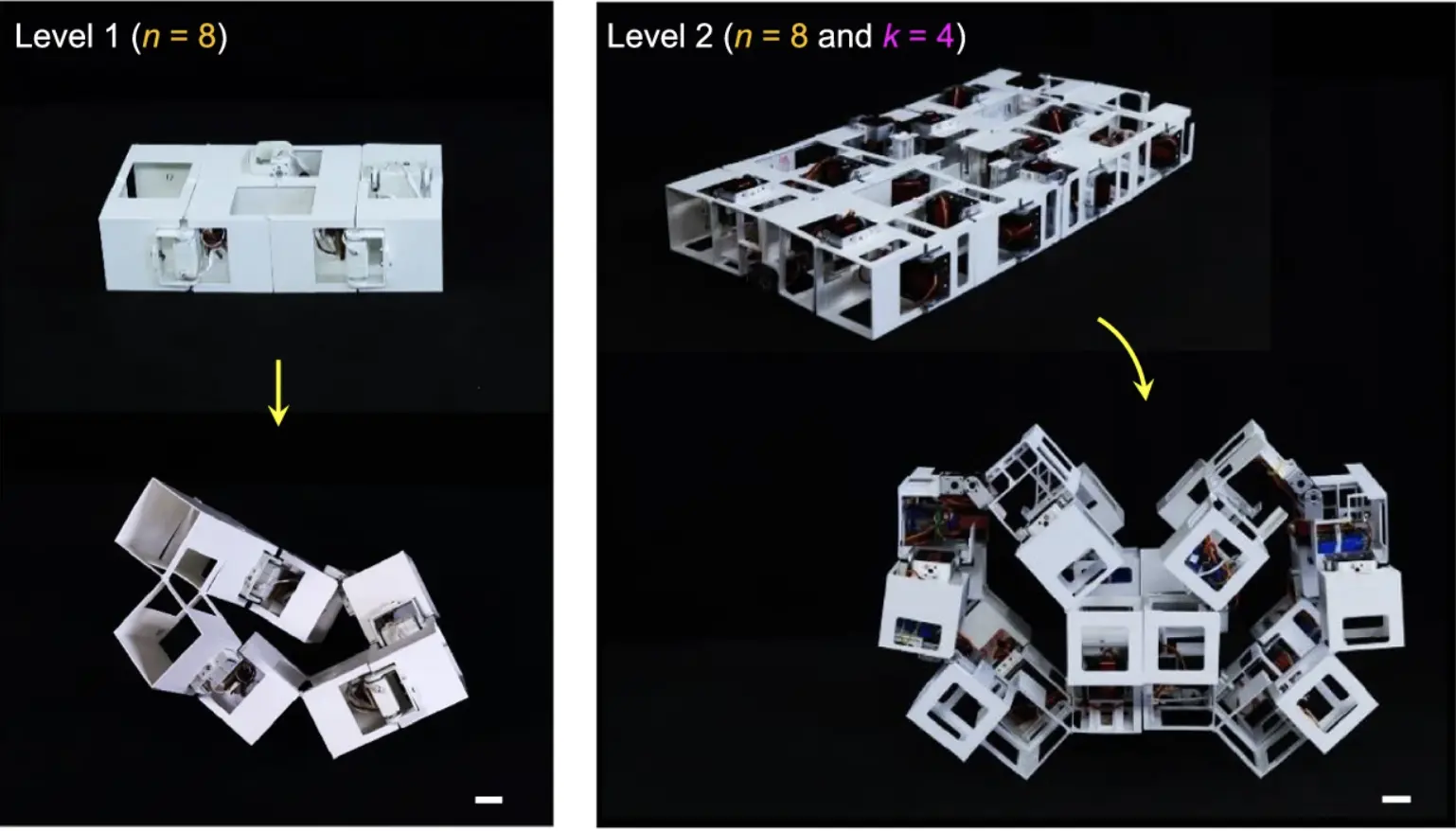
Un team di ricercatori presso la North Carolina State University ha creato una struttura a cubo di plastica in grado di trasformarsi in oltre 1.000 configurazioni utilizzando solo tre motori. Questa scoperta potrebbe portare allo sviluppo di robot versatili per diverse applicazioni, in particolare nell’architettura e nell’esplorazione spaziale.
Nel loro articolo di ricerca, il team spiega come hanno utilizzato una stampante 3D per assemblare 36 cubi di plastica cavi collegati da cerniere rotanti. Alcune cerniere erano fissate con perni di metallo, mentre altre erano motorizzate. Questa configurazione ha permesso alla struttura di trasformarsi in una varietà di forme, compresi tunnel, ponti e strutture a più piani.
Cambiando forma, i transformer bots possono muoversi in tutte le direzioni e portare carichi fino a tre volte il loro peso, tutto senza bisogno di piedi.
I bots mutaforma possono adattarsi a diverse attività e ambienti, rendendoli potenzialmente utili per applicazioni multifunzionali in campi come l’esplorazione spaziale. La capacità dei bots di portare carichi e cambiare forma secondo necessità potrebbe rivoluzionare la progettazione di sistemi artificiali.
“Pensiamo che questi possano essere utilizzati come robot spaziali e habitat configurabili e dispiegabili,”ha affermato Antonio Di Lallo, co-primo autore del paper. “È modulare, quindi puoi inviarlo nello spazio in forma piatta e assemblarlo come un rifugio o come un habitat, e poi smontarlo.”
Sebbene la tecnologia presenti grandi promesse, ci sono alcune limitazioni. La capacità portante delle strutture, specialmente a scale più grandi, ha bisogno di miglioramenti. Gli attuali prototipi sono limitati nella loro capacità di gestire pesi significativi a causa dei materiali utilizzati per le cerniere, che sacrificano la forza per la flessibilità. Inoltre, i ricercatori hanno notato sfide nell’utilizzare pienamente le capacità di mutamento di forma per diverse locomozioni robotiche in ambienti non strutturati.
La ricerca apre nuove strade per future esplorazioni. “Vogliamo creare una struttura più robusta che possa sopportare carichi maggiori,” ha dichiarato Yanbin Li, co-autore corrispondente dell’articolo, sul NC State University News. “Se vogliamo una forma di auto, per esempio, come progettiamo la prima struttura che può trasformarsi in una forma di auto? Vogliamo anche testare le nostre strutture con applicazioni reali come i robot spaziali.”
Lo studio, pubblicato su Nature Communications, è stato sostenuto da finanziamenti della National Science Foundation. Questo approccio innovativo alla progettazione robotica potrebbe spianare la strada a nuovi progressi nei sistemi artificiali, rendendoli più adattabili e funzionali per varie applicazioni.

 Ultimi articoli
Ultimi articoli 


Lascia un commento
Annulla